
Research
Here you can find some musings on research projects I've collaborated in.Cognitive Robotics
Natural language understanding for behavior-based robotic indoor navigation
As part of my master thesis, we investigate novel deep neural network architectures and mechanisms that could improve the generalization of a language model that translates free-form unconstrained directions in English to a series of high-level behaviors that a robot should execute to comply with the instruction.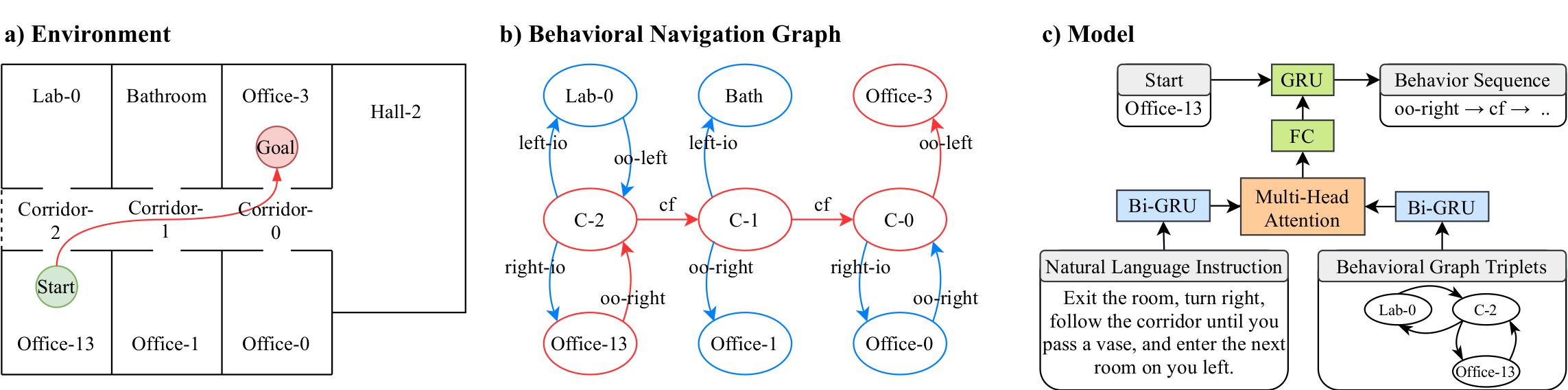
Some of the techniques that we are currently researching consider:
Recommender Systems
Session-based recommendations
We have implemented a seminal paper on session-based recommendations for e-commerce in the Keras framework, using TensorFlow 2.3.0 backend.Counterfactual recommendation systems As part of my teaching assistant duties for the graduate course in recommender systems at PUC Chile, the slides (in spanish) of my counterfactual recommendation tutorial can be found here. An english version is coming out soon. Paper reviews
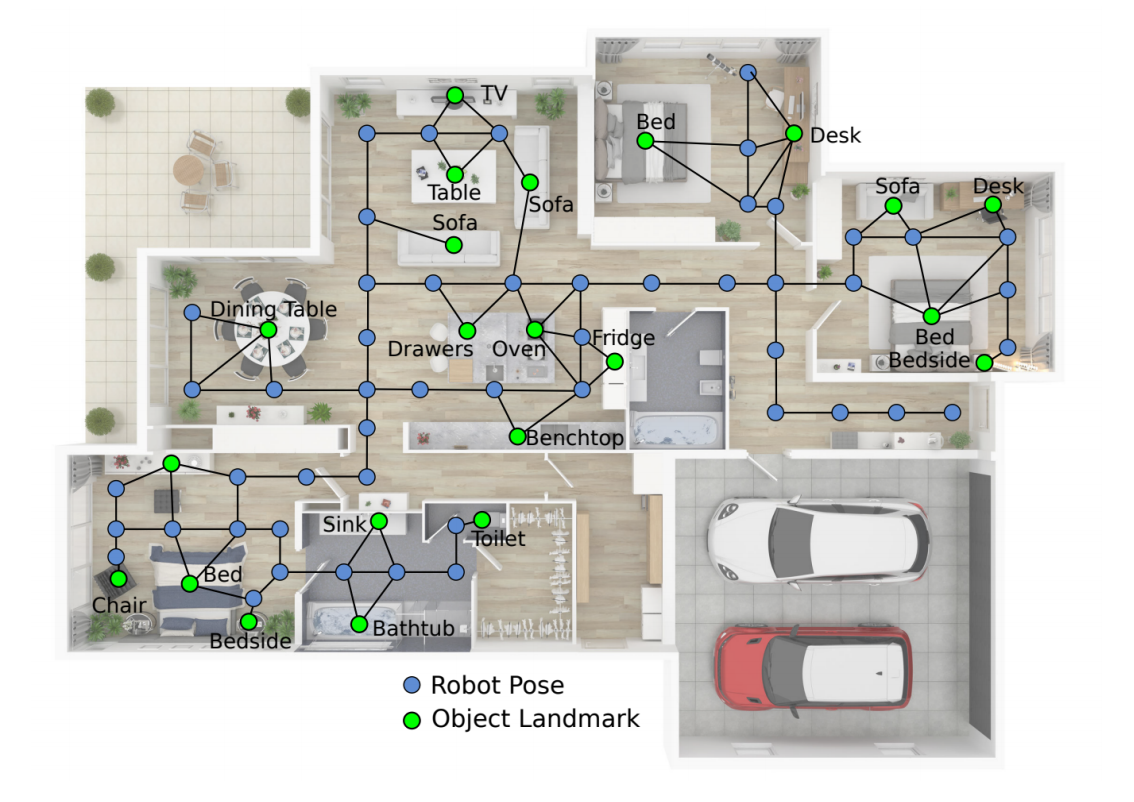
Paper review (Sunderhauf, 2019): Navigating with GCNs
Presented in a weekly meeting at the AI Lab's cognitive robotics group, we review the paper "Where are the keys? Learning object-centric navigation policies on semantic maps with graph convolutional networks" by Niko Sunderhauf.
Slides can be found here.
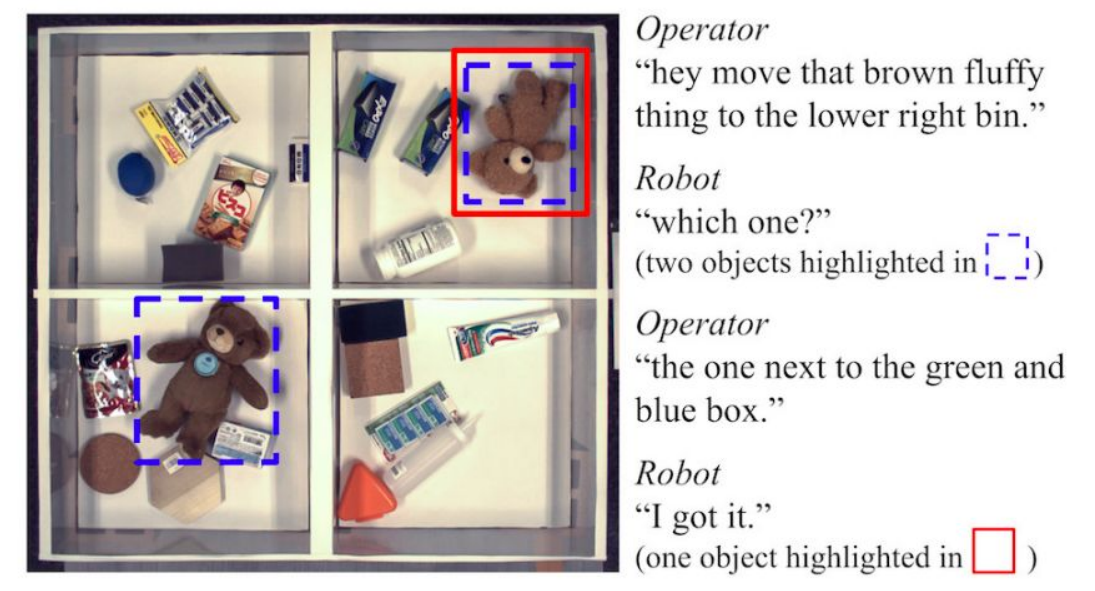
Paper review (Hatori et al, 2017): Interactively Picking Objects Through Language
Presented in a weekly meeting at the AI Lab's cognitive robotics group, we review Preferred Networks' work, "Interactively Picking Real-World Objects with Unconstrained Spoken Language Instructions".
Slides can be found here.
Paper review (Sepúlveda et al, 2018): Deep Learning Behavioral Indoor Navigation
Presented in a weekly meeting at the AI Lab's cognitive robotics group, we review our very own Gabriel Sepúlveda's work, "A Deep Learning Based Behavioral Approach to Indoor Autonomous Navigation".
Slides can be found here.